
The successful performance of interceptive skills, such as a serve-receive in volleyball, depends heavily on spatiotemporal knowledge. Therefore, the player should obtain information about where and when the ball will reach a specific location, in other words, performers should have information that indicates the future (Gray & Regan, 2006). Gibson (1986) argues that the environment provides wealthy information that can be directly perceived and used to guide actions. Consequently, if Gibson was right, there must be some type of invariant information in the environment that specifies future action possibilities for an agent (Carello & Wagman, 2009). My objective for the following subsections is to describe how such information is used.
Information about WHEN
Lee (1976), inspired by the ability that car drivers have to effectively and smoothly brake to avoid collisions, learned that humans can obtain information about time to contact with a given object using the systematic changes in the retinal image of the object. For instance, if an object is approaching our eyes, its image on the back of the retina gets larger, and this rate of expansion specifies time to contact (TTC, tau). Thus, according to Lee’s equation, time to contact is determined by the current size of the retinal image (expressed as angle degree), divided by its rate of expansion over time (Equation 1).
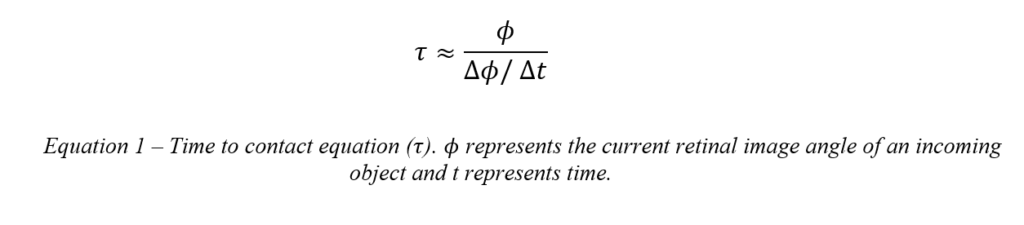
Without any prior knowledge of the object (e.g., distance or size), tau can be used to determine how much time remains to contact an object, no matter how large, how far, or how fast it is. Tau has been extensively studied in the literature and the results are consistent, showing that humans and many other animals rely on this information to estimate and guide many actions, such as interceptive skills and locomotion (e.g., Bastin et al., 2006; Gray & Regan, 2006; Lee, 2007). To make this concept more palpable, in Figure 1, I bring a volleyball example in which a volleyball player is performing a serve-receive. As the player is visually tracking the ball, the image of the ball reaches the back of her retina and increases over time as the ball gets closer. In 0.1 seconds, the angle changed from 10deg to 20deg, and using the tau equation, we can estimate that the time to contact at t1 would be 0.2 seconds (Figure 1).

Information about WHERE
Tau alone does not explain how performers are able to successfully intercept objects because, in addition to knowing when the object will arrive, they must also know where it will arrive. Michaels and colleagues (2006) found that the future location of a moving object can be determined by dividing its angular change in relation to the plane of the eye by its rate of expansion on the retina. The equation is described below in Figure 2.
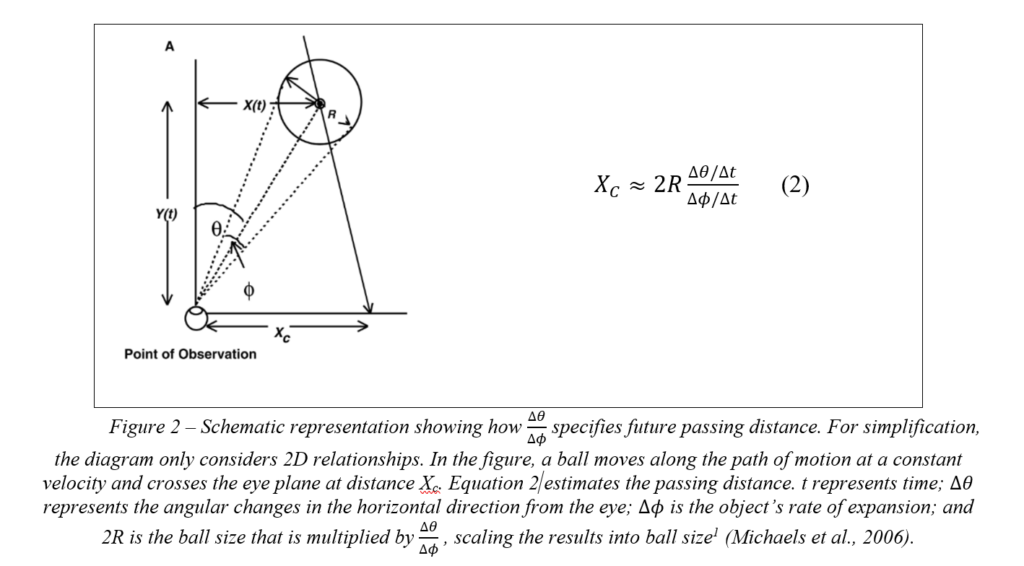
The equation by Michaels et al., (2006) establishes a relationship between the expansion of the image on the retina and how much this object deviates from the line of sight. Although the perception of passing distance can be made with either binocular or monocular vision, binocular vision has been demonstrated to better obey the suggested equation, indicating that the disparity of visual information from the two eyes may contribute to this perception (Jacobs & Michaels, 2006).
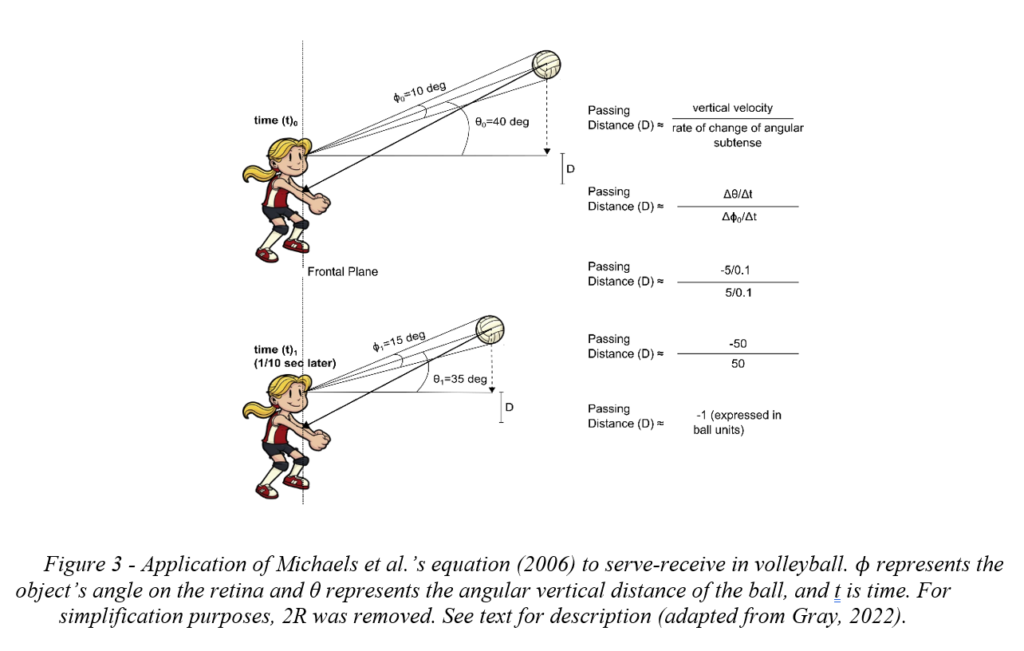
I will describe how to apply the equation in a volleyball scenario. To simplify the calculation, we will consider only the vertical distance, assuming that the ball is already in front of the player. In a volleyball scenario, a player is performing a serve-receive. During an interval of 0.1s (Δt), the angular subtense (Δϕ) of the ball increased by 5 degrees while the vertical angle distance (Δθ) decreased by 5 degrees. Dividing both ϕ and θ by t, gives us the rate of expansion and vertical velocity, respectively. Since the passing distance is (Δθ/Δt)/ (Δϕ/Δt), we can estimate that the ball will arrive at a distance of one ball unit from the eyes of the player (Figure 3).
References
Bastin, J., Craig, C., & Montagne, G. (2006). Prospective strategies underlie the control of interceptive actions. Human Movement Science, 25(6), 718–732. https://doi.org/10.1016/j.humov.2006.04.001
Gray, R., & Regan, D. M. (2006). Unconfounding the direction of motion in depth, time to passage and rotation rate of an approaching object. Vision Research, 46(15), 2388–2402. https://doi.org/10.1016/j.visres.2006.02.005
Rob Gray (Director). (2022, November 16). Information, Specification & Direct Learning. https://www.youtube.com/watch?v=5VlHjnU-rJo
Jacobs, D. M., & Michaels, C. F. (2006). Lateral interception I: Operative optical variables, attunement, and calibration. Journal of Experimental Psychology: Human Perception and Performance, 32(2), 443. https://doi.org/10.1037/0096-1523.32.2.443
Lee, D. N. (1976). A Theory of Visual Control of Braking Based on Information about Time-to-Collision. Perception, 5(4), 437–459. https://doi.org/10.1068/p050437
Lee, D. N. (2007). Guiding movement by coupling taus (p. 155). Lawrence Erlbaum Associates Publishers. Michaels, C. F., Jacobs, D. M., & Bongers, R. M. (2006). Lateral interception II: Predicting hand movements. Journal of Experimental Psychology: Human Perception and Performance, 32, 459–472. https://doi.org/10.1037/0096-1523.32.2.459
Leave a Reply